Introduction
ICRA 2024
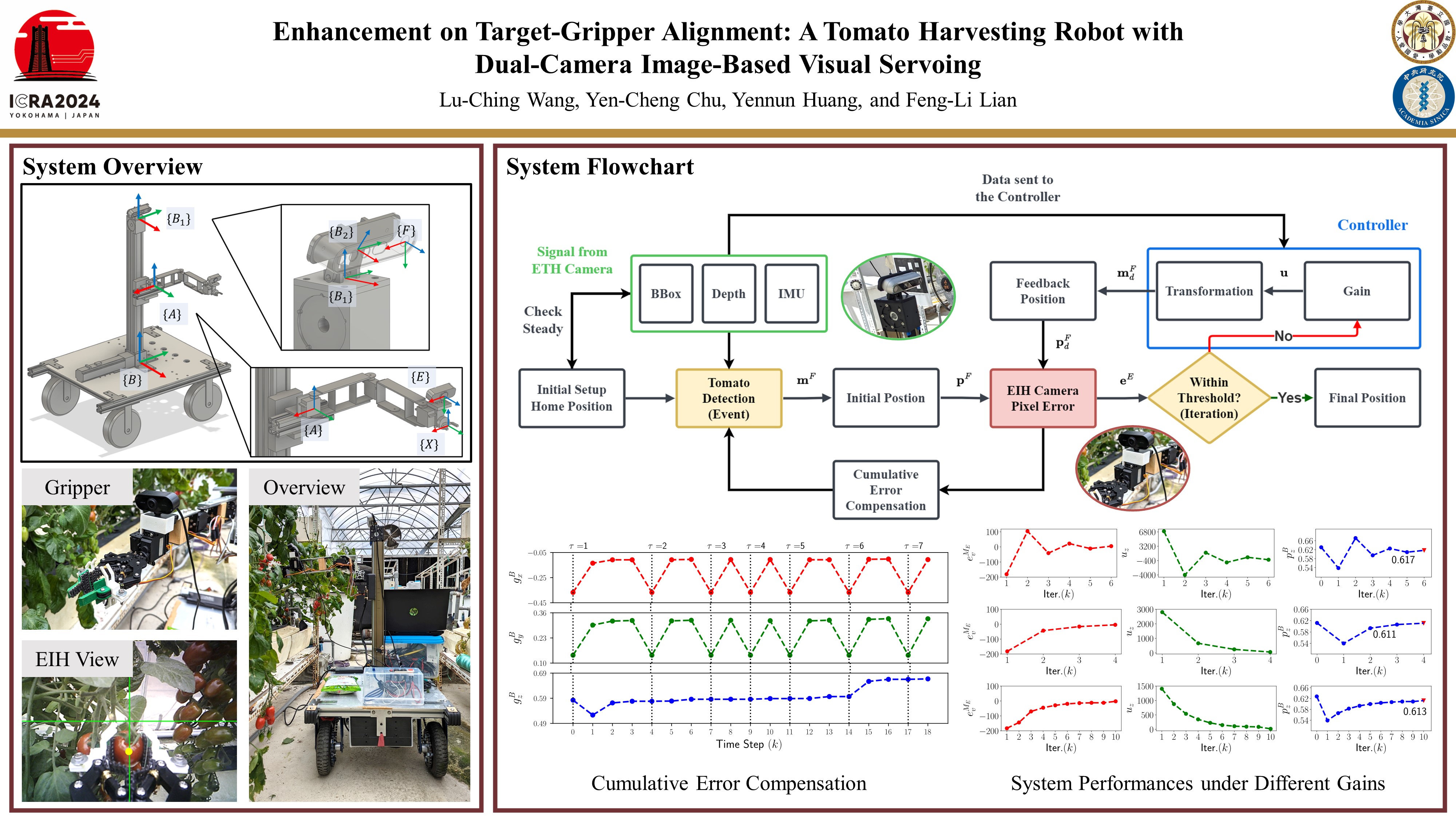
Lu-Ching Wang, Yen-Cheng Chu, Yennun Huang, and Feng-Li Lian
Automation application in crop harvesting has increased in the past decades. Various types of harvesting robots are emerging in both commercial and research areas. One of the main challenges is the precision alignment of the gripper and the target crop. An undesired dislocation can harm both the gripper and the crop, which is mainly caused by uncertainties from the sensors and the manipulator. To solve the problem, the dual-camera setup is designed and implemented on a self-built robot. The perception of the tomato is done by a fixed depth camera and a camera without depth on the gripper. The proposed dual-camera image-based visual servoing (IBVS) controller is designed to deal with the image feedback from both cameras and the proof of asymptotically convergence is provided. Furthermore, the cumulative error compensation reduces the time for the harvesting process. The experiments were conducted in the greenhouse and tested under various conditions. The time cost is formulated as a function and the success picking rate of tomatoes is 68.4%.
@INPROCEEDINGS{10610772,
author={Wang, Lu-Ching and Chu, Yen-Cheng and Huang, Yennun and Lian, Feng-Li},
booktitle={2024 IEEE International Conference on Robotics and Automation (ICRA)},
title={Enhancement on Target-Gripper Alignment: A Tomato Harvesting Robot with Dual-Camera Image-Based Visual Servoing},
year={2024},
pages={13611-13617},
doi={10.1109/ICRA57147.2024.10610772}}