About Me

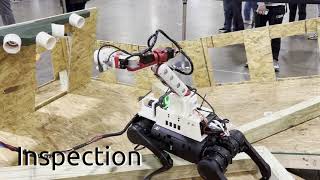
I am currently a robotics research engineer at the Inventec AI Center's robotics group, where we mainly focus on
quadruped robots, manipulators and reinforcement learning research.
I have completed my master's degree at National Taiwan University, Department of Electrical Engineering.
My master's research focused on robotics and automation, specifically in visual servoing, manipulators and
autonomous mobile robots.
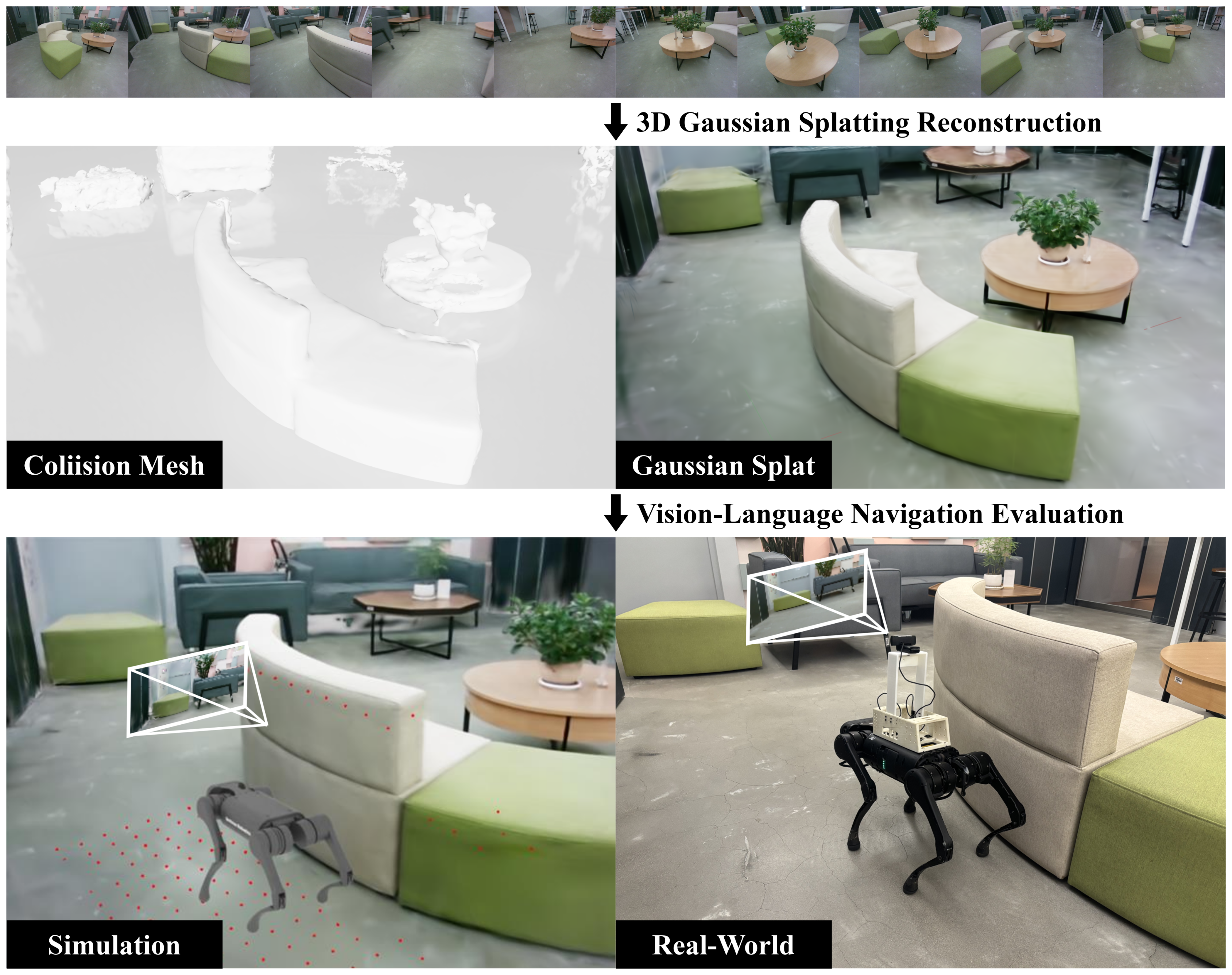
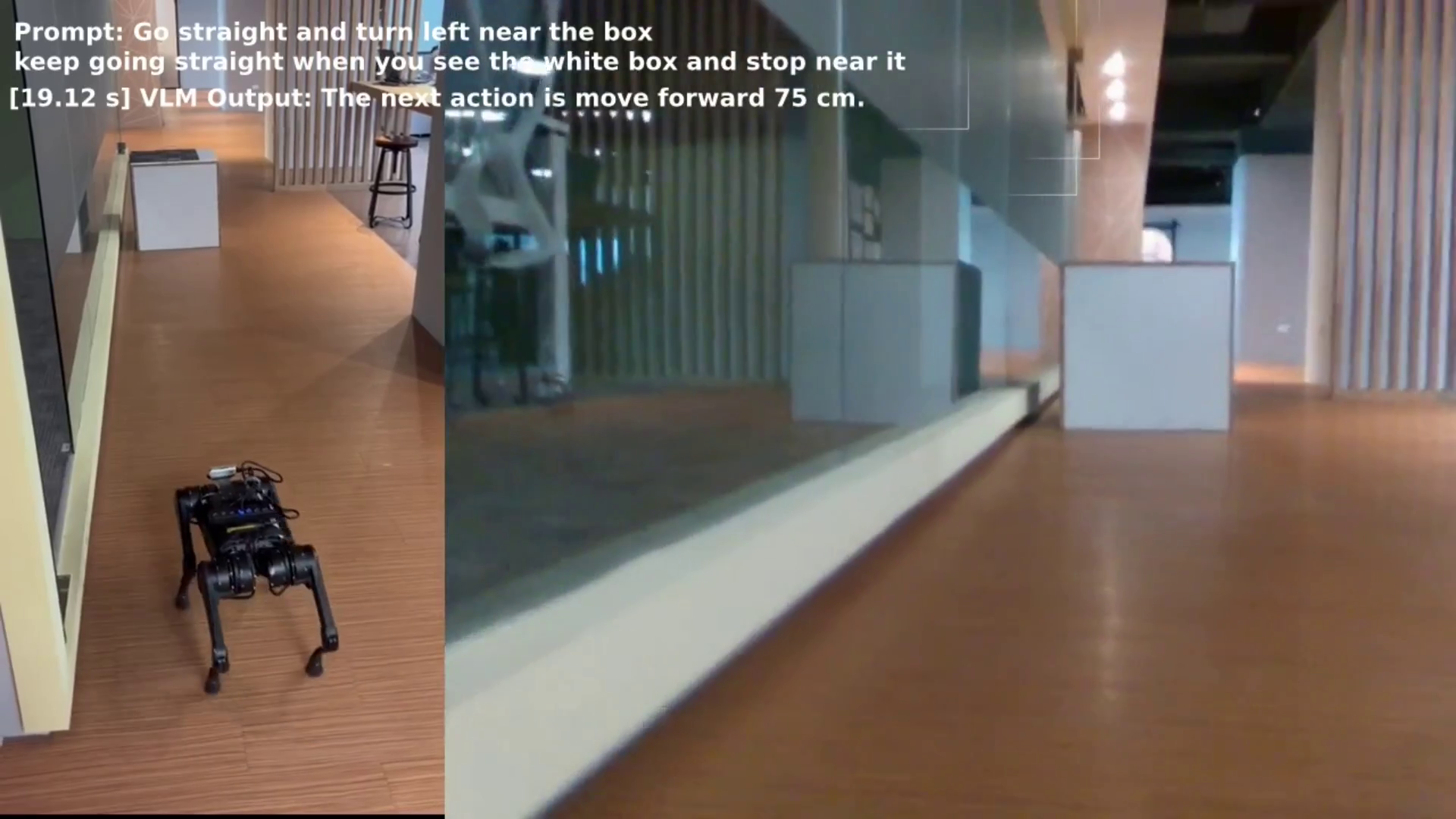
In the past few months, I was working on vision-language navigation for quadruped robots and 3D scene
reconstruction methods (gaussian splatting).
Recently, our team is benchmarking on real-to-sim reconstruction pipelines and investigating differentiable
simulators (Newton).
- Education:
- National Taiwan University (NTU), MS, Electrical Engineering (Sep. 2022 – Jun. 2024)
- National Yang Ming Chiao Tung University (NYCU), BS, Mechanical Engineering (Sep. 2016 – Jun. 2021)